重大学子在中国机械行业卓越工程师教育联盟第二届“恒星杯”毕业设计大赛中斩获佳绩
近日,中国机械行业卓越工程师教育联盟第二届“恒星杯”毕业设计大赛成功落幕。该赛在教育部高等教育司指导下,由中国机械工程学会和中国机械行业卓越工程师教育联盟共同主办,旨在提高学生解决工程问题的能力和展现学生创新能力,要求参赛项目与企业工程实际相结合,大赛决赛在西安交通大学(兴庆校区)进行。大赛共收到正式参赛作品372项。经形式审查和专家函评筛选,共选出150项作品进入决赛,评选出金奖1项,银奖6项,铜奖12项,优秀奖30项和佳作奖70项。
机械工程学院14级机自实验班学生周毅获大赛银奖,14级机自10班学生王冠超获大赛铜奖。重庆大学参赛队伍再次获得优异成绩,参赛的9项作品均获得奖项:
参加大赛的机械工程学院学生均来自2014级毕业班,从初定题目,到最终完成毕业设计,整个过程中他们都保持着较高的工作热情,指导老师也投入了大量的时间和心血对学生们进行耐心指导。毕业设计的内容尝试解决工业企业以及现实生活中的工程问题,学生会向导师定期做工作汇报,听取老师的意见和建议,从而修改、完善自己毕业设计内容的不足。这次的参赛经历,激发了学生们的创造力,提高了他们的工程实践综合能力。
附 获奖项目介绍:
银奖:《双电机冗余驱动加油开关齿轮减速机构设计》
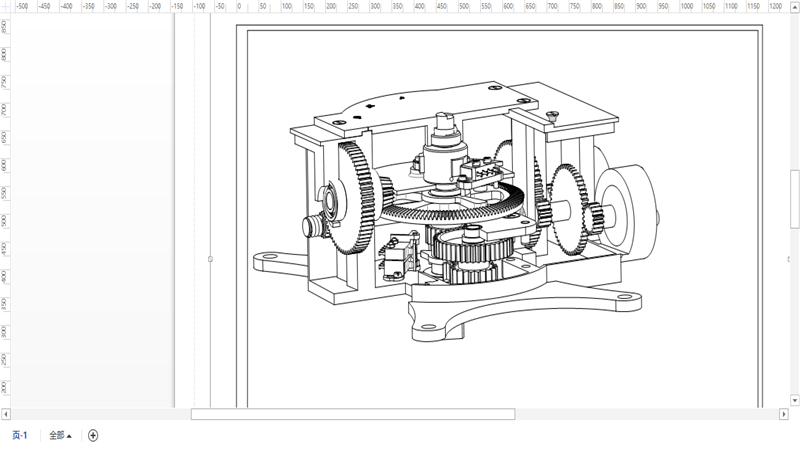
参赛学生:周毅 指导老师:魏静
针对在有限空间下双电机冗余驱动加油开关齿轮减速机构的高效率和轻量化设计,提出了两种双电机工作模式,并分别建立传动方案,最终优选其中一种进行详细设计。采用拓扑优化的方法,在不影响强度、刚度的情况下,去除了箱体组件15.41%的材料,优化后机构总重量约为1.1kg,完成了双电机冗余驱动加油开关齿轮减速机构的轻量化设计。设计过载保护装置,以实现在过载荷力矩工况下的过载保护。设计限位装置,使输出轴的转动角度限制在0~90°。
铜奖:《基于振动吸附原理的仿壁虎四足爬壁机器人的结构设计》
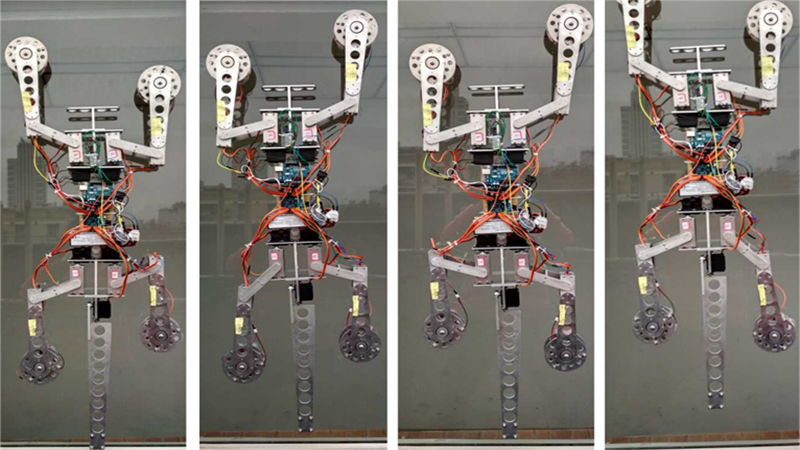
参赛学生:王冠超 指导老师:陈锐
为解决现有吸附方式无法满足生产需求的矛盾,该项目设计了一种基于振动吸附原理的仿壁虎爬壁机器人结构开发,可以仿照壁虎运动实现步态转换实现爬壁作业。整机可搭载检测设备进行工作,亦可实现独自快速的运动。机器人在运动机构上采用了仿壁虎的结构设计,吸附模块采取了振动吸附方式,实现了机器人的爬行运动和完整的吸附过程。机器人从总体结构上,可分为足部模块、腿部结构、躯干结构、尾部结构,最终加工出实物整体并进行了整体调试。
优秀奖:《旋翼吸附式爬壁机器人设计》
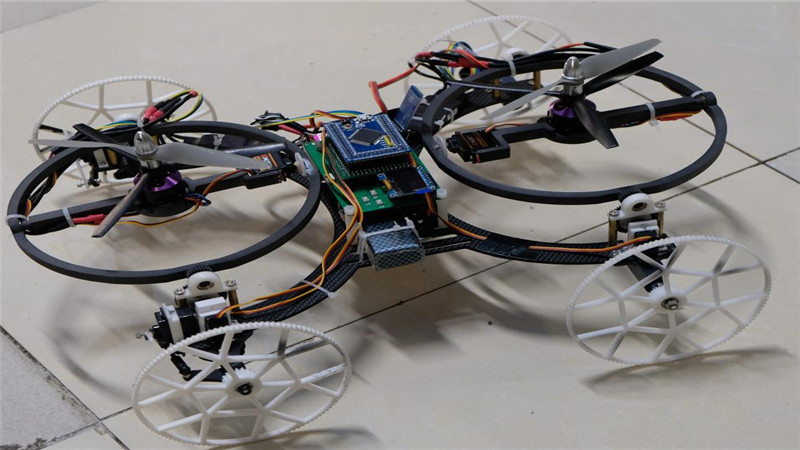
参赛学生:肖大飞 指导老师:柏龙
日常生活中,人们会遇到各种壁面作业情形,这使得适用于壁面作业的爬壁机器人具有重要研究意义。基于旋翼吸附原理,本课题设计了一种轮式爬壁机器人。该机器人以旋翼系统作为唯一动力源,借助旋翼推力克服重力,实现吸附,推力的分力也作为移动动力。旋翼系统包含两个旋翼,每一个旋翼的安装基座具有两个转动自由度,使得控制系统可以对旋翼推力的方向进行灵活调节。将此机器人作为爬壁平台,通过搭载对应执行设备可应对各种壁面作业。
优秀奖:《变刚度软体机械手设计》
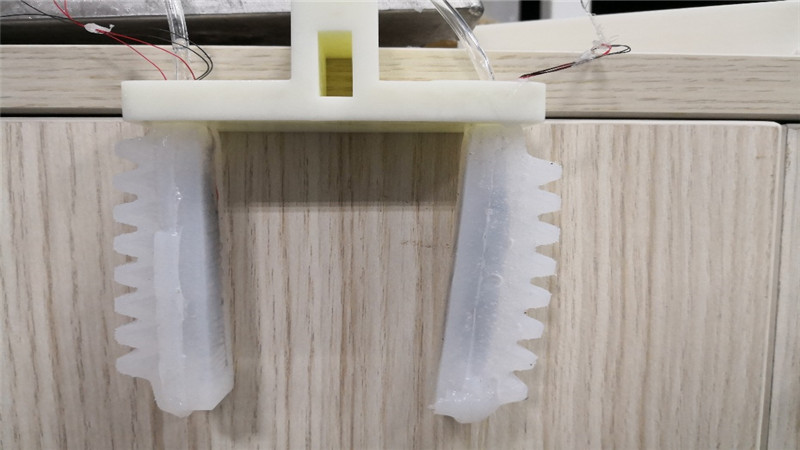
参赛学生:徐强 指导老师:陈锐
近年来,各种各样的机器人作为一种新型工具进入到人们生活的方方面面。它们常被用来代替人们从事各类单调、重复、危险的工作。针对刚性机械手柔性不足与柔性机械手刚度不足等问题,该项目设计了一种变刚度软体机械手,研究分析了多种变刚度材料及机械手的驱动方式,主要设计了气体驱动结构及加热层变刚度结构,制造成型的样机能够实现软体抓手在抓取物体时具有较好的柔性及足够的刚度。
