航空航天学院吴宇副教授团队在无人机城市低空环境智能决策与管控领域取得系列研究进展
近年来,无人机已被逐渐应用于城市环境中的各种任务。特别是在抗震救灾、疫情防护等地面交通受阻情况下,将无人机用于物资运送、活动监控、紧急救援等场景,能够减少人受伤、被传染的风险,提高任务完成效率。如何进一步扩展无人机应用范围,使其在区域覆盖、目标搜索、治安维护等任务中减轻工作人员的负担,是未来智慧城市的重要发展方向。同时,未来低空空域的开放也会使无人机数量骤增,增大发生飞行冲突的概率。因此,如何同时提高低空空域飞行安全性与使用效率也是亟须解决的问题。
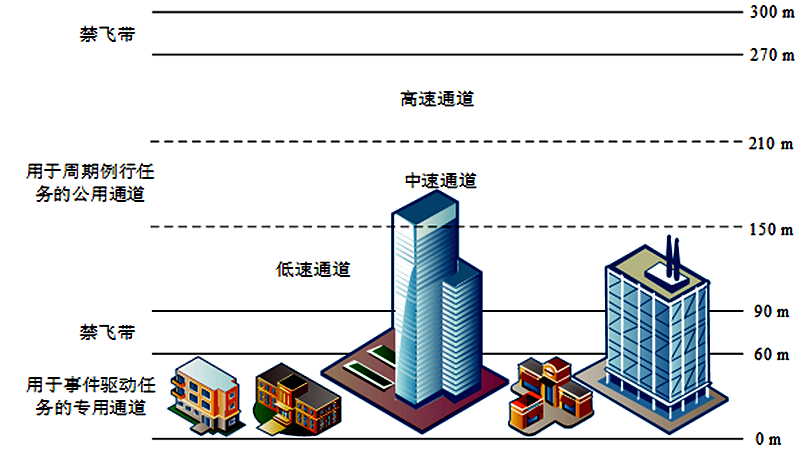
图1 低空空域层次划分
针对以上问题,吴宇副教授团队基于“AirMatrix”无人机系统仿真平台,建立了城市环境模型,定义了无人机飞行规则。考虑航拍时地面区域对拍摄分辨率的不同要求,设计了无人机自主调整飞行高度的策略(Complex & Intelligent Systems, 2021)。为实现对地面运动目标的全角度拍摄和锁定,提出了多机协同异步决策方法,并考虑了无人机视线被建筑物遮挡的情况(IEEE Internet of Things Journal, 2022)。基于离散空间形式的一致性算法,设计了无人机编队低空飞行成形与避障方法(ISA Transactions, 2022)。鉴于无人机、无人车、人在功能上的互补,为实现对地面区域的完全与持续覆盖,基于遗传-分布估计杂交算法,生成了空-地环形航路,并支持动态环境下对该环形航路进行局部调整(IEEE Internet of Things Journal, 2021)。从提升城市安保效率出发,引入了空-地-人系统,通过对多个地面目标的运动模式进行预测,开发了基于启发式枚举的目标搜索算法与基于动态分组的多目标抓捕算法,实现了在复杂局势下对目标的包围与捕获(Knowledge- d Systems, 2022)。
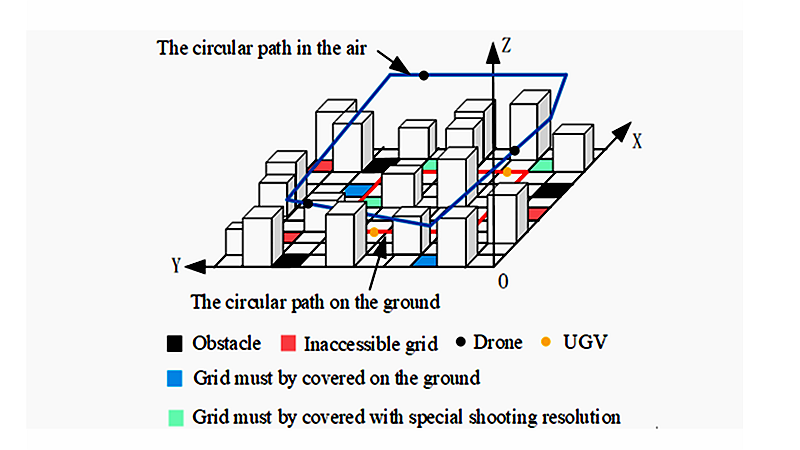
图2 无人机&无人车执行地面区域完全与持续覆盖任务
在无人机管控方面,根据用户提出的临时使用低空空域的申请,为每个用户提供多条从起点到终点的备选航线。考虑用户优先级高低,以低空空域容量限制为约束,设计多用户冲突解决策略,生成无人机飞行方案(IEEE Transactions on Vehicular Technology, 2021)。该方案在任务与外界环境变化时,需要进行动态调整。总结任务变更与外界环境变化的不同类型,提出了在线自适应重规划方法(IEEE Systems Journal, 2021)。未来低空空域也可使无人机实现公交化运行,而设计空中巴士(AirMetro)调度方案能大大提高运行效率。首先基于管道走廊算法,生成每条公交线路往返的最短飞行航线,再基于层次-公平原则的调整策略设计航班冲突解决方案,最终生成周期性的航班时刻表(Transportation Research Part C: Emerging Technologies, 2021)。
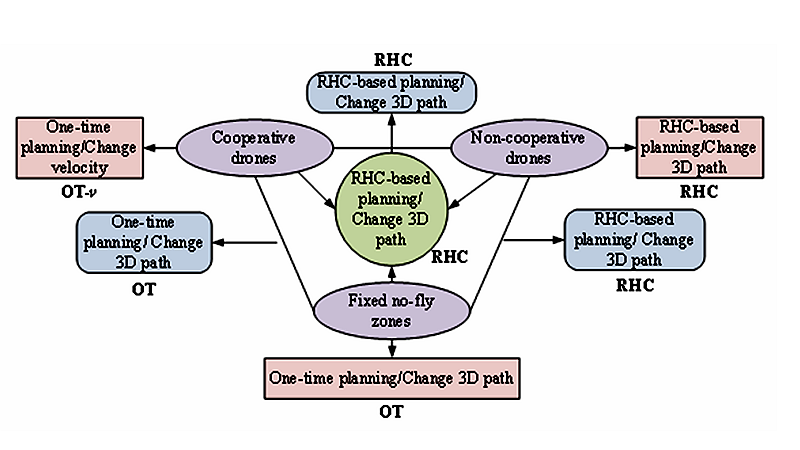
图3 无人机自适应航路重规划策略
上述工作受到了国家自然科学基金项目与重庆市自然科学基金项目的资助,研究成果均在中科院2区及以上的国际期刊上发表,是团队关于无人机智能控制与决策领域研究取得的最新进展,可为分析低空空域容量与扩展无人机应用场景提供有力工具,同时为无人机空中管控系统的开发提供理论依据与技术支撑。该团队目前也同时在航母舰载机出动回收效率评估、无人机智能空战决策等课题上开展研究。
