航空航天学院在跨介质飞行器轨迹优化与协同制导领域取得研究进展
航空航天学院青年教师吴宇在跨介质飞行器轨迹优化与协同制导领域取得了一系列原创性研究成果。他于2019年4月以第一\通讯作者在航空宇航领域国际权威顶级期刊《Aerospace Science and Technology》(JCR Q1区,排名3/31)发表了题为“Dynamics modeling and trajectory optimization for unmanned aerial-aquatic vehicle diving into the water”的学术论文,并且以唯一作者在航海领域国际权威顶级期刊《Ocean Engineering》(JCR Q1区,排名2/14)发表了题为“Coordinated path planning for an unmanned aerial-aquatic vehicle (UAAV) and an autonomous underwater vehicle (AUV) in an underwater target strike mission”的学术论文。该系列论文研究了跨介质飞行器入水轨迹优化与异构无人系统协同制导问题,为解决该问题提供了一种建模与算法设计的新思路。论文的研究结果具有重要的理论意义和较强的实际应用价值。以上系列工作得到了中央军委装备预研领域基金“多源/多域导航、制导与控制新技术”项目的资助。
跨介质飞行器是指可以实现水空两栖作业的飞行器。由于水体环境和空气环境的显著差异,使飞行器在这两种介质中同时具有航行能力是一项艰巨的任务。跨介质飞行器具备无人机的高速高机动,无人水面舰艇的快速游弋能力和无人水下航行器的高隐蔽性等优势,因此在军事和民用领域都具有广阔的应用前景。
跨介质飞行器入水时通常采用折叠机翼以减少阻力。入水过程中受到重力、空气动力、浮力、流体力等作用,其中流体作用力最为复杂。将流体作用力考虑为由理想流体与粘性流体所引起,分别进行计算,计算理想流体作用力时考虑附加质量的影响,而计算粘性阻力时的升阻力系数则通过数值模拟获得。为获得跨介质飞行器的最优入水轨迹(如入水时间最短、到达水下指定目标的偏差最小等),利用所建立的入水运动模型,设计了自适应-最优导向的布谷鸟算法。在搜索过程中该算法能够根据当前情况自动调整参数,始终考虑全局最优解的影响。采用该方法获得的跨介质飞行器入水轨迹优于粒子群算法和标准布谷鸟算法的结果。
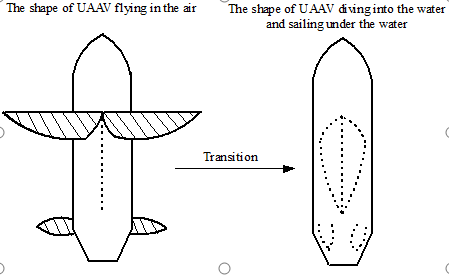
图1 跨介质飞行器在不同介质中的外形 (空中机翼展开,提供足够升力,入水及水下机翼折叠,减小阻力)

图2 入水速度随时间变化曲线 (可看到采用自适应-最优导向布谷鸟算法ICS时,跨介质飞行器入水时间最短)
在跨介质飞行器成功入水的基础上,吴宇老师进一步研究了由跨介质飞行器与水下航行器组成无人系统的协同方法。以对水下运动目标的打击任务为例,首先由跨介质飞行器在空中进行侦察,当发现水下目标后立即入水,并在入水后将目标信息发送给水下航行器,之后两者合作共同对目标发起攻击。在此项研究中,建立了两种装备在不同介质中的运动模型、协同通信与打击约束模型以及任务指标模型,并用卡尔曼滤波方法对水下目标的运动进行了准确预测。基于群智能优化理论,设计了协同算法,减少了在线计算量并提高了协同打击效果。
据悉,吴宇老师后续还将继续开展对以无人机、无人水面航行器、无人水下航行器为作战平台的海-空一体化协同控制研究。
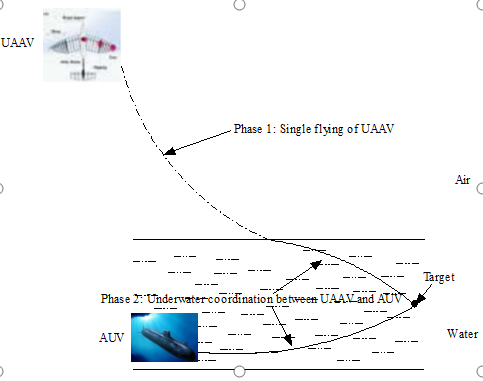
图3 水下目标协同打击任务场景 (第一阶段跨介质飞行器单独在空中飞行,第二阶段跨介质飞行器入水后两装备协同打击水下运动目标)
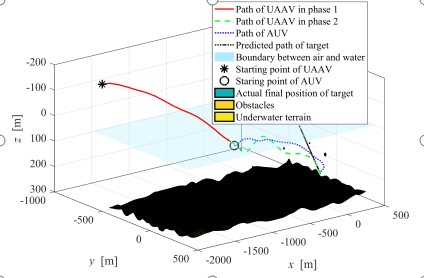
图4协同打击仿真结果 (分别展示了各装备与水下目标运动轨迹,以及海底地形与障碍物)
论文链接1:https://www.sciencedirect.com/science/article/pii/S1270963818314317
论文链接2:https://www.sciencedirect.com/science/article/pii/S002980181930191X
